IndikĂĄtor pro lokaci pĆesnĂ© polohy za zdĂ
PĆĂspÄvek prezentuje vĂœsledky speciĂĄlnÄ vyvinutĂ©ho zaĆĂzenĂ pro pĆesnou lokalizaci polohy za zdĂ. Je urÄen pro oblast stavebnictvĂ, kde je nutnĂ© stanovit pĆesnĂ© polohy na obou stranĂĄch stÄny. NavrĆŸenĂœ indikĂĄtor vyuĆŸĂvĂĄ principu elektromagnetickĂ©ho pole a sklĂĄdĂĄ se z vysĂlacĂ a pĆijĂmacĂ ÄĂĄsti. VysĂlaÄ vysĂlĂĄ elektromagnetickĂ© vlny se specifickou frekvencĂ a modulacĂ z jednĂ© strany zdi a pĆijĂmaÄ s nastavitelnou citlivostĂ na stranÄ druhĂ© vyhodnocuje a pĆedĂĄvĂĄ informace provozovateli indikĂĄtoru polohy. PopsanĂ© zaĆĂzenĂ umoĆŸĆuje detekovat polohu za zdĂ k vĂœchozĂmu bodu skrze pĆekĂĄĆŸku tlouĆĄĆ„ky aĆŸ pĆŻl metru.
1. Ăvod
V nÄkterĂœch situacĂch potĆebujeme urÄit pĆesnou polohu za zdĂ, tedy pĆenĂ©st referenÄnĂ bod z jednĂ© strany zdi na druhou. Äasto je tento poĆŸadavek ve stavebnictvĂ pĆi nutnosti lokalizace pĆesnĂ©ho bodu pro vrtĂĄnĂ otvoru skrze netransparentnĂ pĆekĂĄĆŸku. PoĆŸadavek na vĂœvoj prezentovanĂ©ho zaĆĂzenĂ vĆĄak vychĂĄzel z RTG diagnostiky poĆĄkozenĂ dĆevÄnĂœch prvkĆŻ staveb, kde bylo nutnĂ© najĂt pĆesnou polohu za detekovanĂœm prvkem pro umĂstÄnĂ RTG pĆĂstroje a bezdrĂĄtovĂ©ho detektoru pro pĆĂmou digitalizaci obrazovĂ© pĆedlohy. NalezenĂ sprĂĄvnĂ© polohy pro umĂstÄnĂ RTG pĆĂstroje a detektoru znamenĂĄ dosaĆŸenĂ optimĂĄlnĂho RTG pole a tĂm zĂskĂĄnĂ kvalitnĂho RTG snĂmku. NalezenĂ referenÄnĂho bodu pomocĂ mÄĆenĂ vzdĂĄlenostĂ je nejen zdlouhavĂ©, ale i nepĆesnĂ© a nÄkdy dokonce nemoĆŸnĂ©. I pĆesto, ĆŸe jsou znĂĄma elektronickĂĄ zaĆĂzenĂ urÄujĂcĂ polohu hledanĂœch cĂlĆŻ, kterĂ© pracujĂcĂ na rĆŻznĂœch principech (odrazu, rezonance atd.) dle podstaty hledanĂ©ho pĆedmÄtu nebo na bĂĄzi elektromagnetickĂœch vln (hledaÄe rezonance, hledaÄe kovĆŻ, detektory radioaktivity, rentgenovĂ© zĂĄĆenĂ, radar apod.) chybĂ pĆĂstroj, kterĂœ by rychle a spolehlivÄ urÄil protilehlou polohu za zdĂ. StÄna mĆŻĆŸe bĂœt sloĆŸena z vĂce materiĂĄlĆŻ a mĆŻĆŸe vykazovat jistou mĂru nehomogenity v zĂĄvislosti na skladbÄ materiĂĄlĆŻ. NalezenĂ referenÄnĂch bodĆŻ na obou stranĂĄch jejĂho povrchu je technicky obtĂĆŸnĂ©, zejmĂ©na z dĆŻvodu Ăștlumu signĂĄlu zpĆŻsobenĂ©ho vlivem jeho ĆĄĂĆenĂ ve zvolenĂ©m materiĂĄlu. NavrhovanĂœ indikĂĄtor polohy se sklĂĄdĂĄ z vysĂlacĂ a pĆijĂmacĂ ÄĂĄsti a pracuje na zĂĄkladÄ fyzikĂĄlnĂch zĂĄkonĆŻ a to elektromagnetismu a rezonanÄnĂho jevu [1, 2]. ZĂĄkladem vysĂlaÄe i pĆijĂmaÄe jsou LC obvody naladÄnĂ© na stejnou rezonanÄnĂ frekvenci. AktivnĂ vysĂlacĂ ÄĂĄst vyzaĆuje elektromagnetickĂ© pole, kterĂ© mĂĄ za nĂĄsledek indukovĂĄnĂ napÄtĂ v pĆijĂmacĂm obvodu. PosunovĂĄnĂm pĆijĂmaÄe po povrchu zdi je hledĂĄno mĂsto s nejvÄtĆĄĂ intenzitou elektromagnetickĂ©ho pole. NavrĆŸenĂœ systĂ©mem jehoĆŸ senzory pracujĂ na vyhledĂĄvĂĄnĂ maxima modulu amplitudy elektromagnetickĂ© vlny, je dosahovĂĄno vyĆĄĆĄĂ pĆesnosti urÄenĂ protilehlosti. Jako indikĂĄtor nalezenĂ polohy mĆŻĆŸe obsluze slouĆŸit ruÄiÄkovĂœ mÄĆicĂ pĆĂstroj nebo LCD displej.
2. LC obvody
NejdĆŻleĆŸitÄjĆĄĂmi prvky celĂ©ho indikĂĄtoru jsou jeho vysĂlacĂ a pĆijĂmacĂ LC obvody. Proto byla provedena Ćada mÄĆenĂ a bylo vyrobeno a odzkouĆĄeno mnoho cĂvek s rĆŻznĂœmi parametry. LiĆĄily se hodnotami, tvarem, velikostĂ, prĆŻĆezem vodiÄe, pouĆŸitĂœm feritovĂœm jĂĄdrem, ale i polohou umĂstÄnĂ. Z vĂœsledkĆŻ plyne, ĆŸe jejich konstrukce a nĂĄvrh mĂĄ velkĂœ vliv na indukovanĂ© napÄtĂ v sekundĂĄrnĂm obvodu. Hodnoty kondenzĂĄtorĆŻ a cĂvek byly navrĆŸeny a vypoÄĂtĂĄny podle Thomsonova vztahu (1) tak, aby jejich rezonanÄnĂ frekvence byla v oblasti 450 kHz. Na tomto kmitoÄtu je z praktickĂœch zkuĆĄenostĂ zjiĆĄtÄna nejlepĆĄĂ prostupnost signĂĄlu stavebnĂm materiĂĄlem [3].
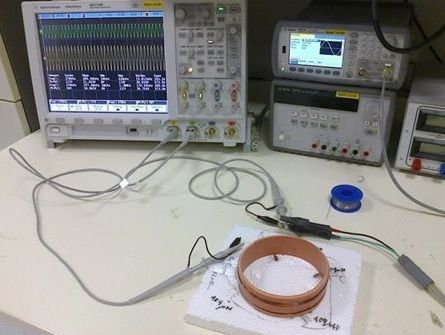
CĂvky byly navinuty na feritovĂĄ jĂĄdra a pomocĂ RLC metru kontrolovĂĄny jejich hodnoty. Frekvence vstupnĂho napÄtĂ vysĂlacĂho LC obvodu musela bĂœt vĆŸdy takovĂĄ, aby na pĆijĂmacĂm LC obvodu bylo maximĂĄlnĂ indukovanĂ© napÄtĂ. Tento poĆŸadavek splĆuje jiĆŸ zmĂnÄnĂĄ rezonanÄnĂ frekvence 450 kHz. JemnĂœm ladÄnĂm generĂĄtoru bylo dosaĆŸeno nejvÄtĆĄĂ amplitudy napÄtĂ na pĆijĂmacĂ stranÄ. Tato mÄĆicĂ technika vĆĄak nenĂ pĆĂliĆĄ pĆesnĂĄ, pĆedevĆĄĂm z dĆŻvodu tvrdosti zdroje a BNC kabelu, kterĂœ mĂĄ kapacitu desĂtky pF/m a tvoĆĂ tak parazitnĂ sĂ©riovou kapacitu [4]. BlokovĂ© schĂ©ma mÄĆenĂ rezonance je zobrazeno na obr. 1.

Obr. 1 – HledĂĄnĂ rezonanÄnĂho kmitoÄtu
2.1 HledĂĄnĂ maxima
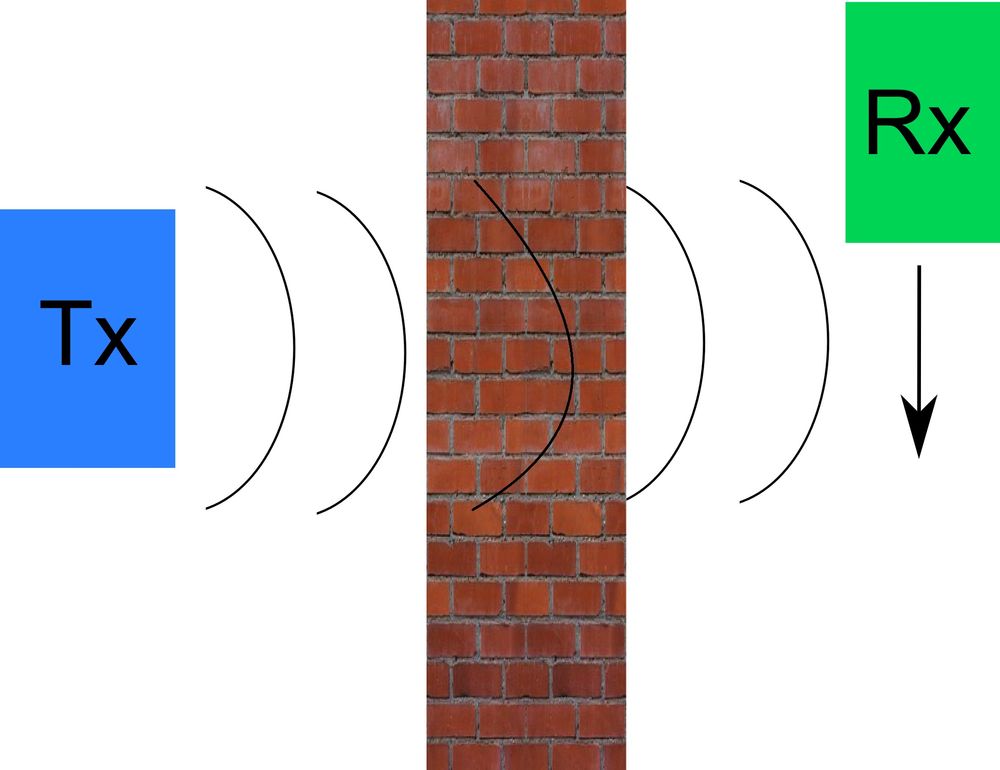
Obr. 2 – HledĂĄnĂ maximĂĄlnĂ intenzity (Tx – vysĂlaÄ, Rx – pĆijĂmaÄ)
NejjednoduĆĄĆĄĂm ĆeĆĄenĂm vysĂlaÄe je sĂ©riovĂœ LC obvod s jednĂm kondenzĂĄtorem a jednou vyzaĆovacĂ cĂvkou. VyzaĆovanĂ© pole se indukuje v pĆijĂmacĂ cĂvce a ÄĂm blĂĆŸe jsme vysĂlaÄi, tĂm vÄtĆĄĂ bude indukovanĂ© napÄtĂ. MluvĂme o hledĂĄnĂ maximĂĄlnĂ intenzity elektromagnetickĂ©ho pole, obr. 2.
2.2 HledĂĄnĂ minima
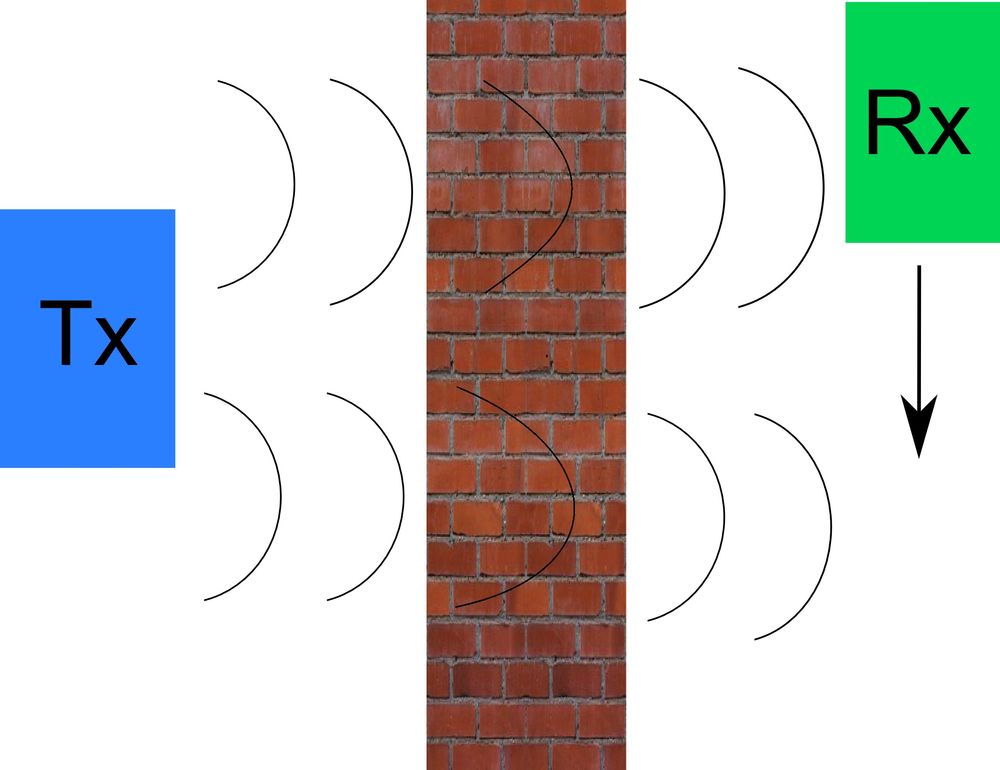
Obr. 3 – HledĂĄnĂ minimĂĄlnĂ intenzity (Tx – vysĂlaÄ, Rx – pĆijĂmaÄ)
KromÄ hledĂĄnĂ maximĂĄlnĂ intenzity elektromagnetickĂ©ho pole existuje i uspoĆĂĄdĂĄnĂ senzorĆŻ umoĆŸĆujĂcĂ metodiku mÄĆenĂ minimĂĄlnĂ intenzity elektromagnetickĂ©ho pole, obr. 3. HledĂĄnĂ minima je zaloĆŸeno na vytvoĆenĂ alespoĆ tĆech nezĂĄvislĂœch elektromagnetickĂœch polĂ, kterĂ© jsou vyzaĆovĂĄny tĆemi LC obvody. Tato metoda hledĂĄnĂ minimĂĄlnĂ intenzity je v literatuĆe popisovĂĄna jako pĆesnÄjĆĄĂ oproti hledĂĄnĂ maxima, ale vyĆŸaduje nĂĄroÄnÄjĆĄĂ konstrukci vysĂlacĂ ÄĂĄsti.
3. Realizace
Pro realizaci zaĆĂzenĂ byla vybrĂĄna metodika mÄĆenĂ, kdy v pĆĂmĂ©m smÄru vysĂlaÄ vysĂlĂĄ signĂĄl o hodnotÄ maximĂĄlnĂho modulu amplitudy elektromagnetickĂ© vlny a pĆijĂmaÄ pĆijĂmĂĄ signĂĄl ve smÄru pozice vysĂlaÄe, kterĂœ je umĂstÄn na optimĂĄlnĂ pozici, pro nalezenĂ maxima modulu amplitudy elektromagnetickĂ© vlny. ElektromagnetickĂœ vysĂlaÄ signĂĄlu se sklĂĄdĂĄ z oscilaÄnĂho obvodu, zesilovaÄe a antĂ©ny. ElektromagnetickĂœ pĆijĂmaÄ signĂĄlu se sklĂĄdĂĄ z antĂ©ny, demodulaÄnĂho zaĆĂzenĂ a vyhodnocujĂcĂho prvku – indikĂĄtoru. VysĂlaÄ je napĂĄjen bateriĂ a obsahuje nastavitelnĂœ generĂĄtor, kterĂœ posĂlĂĄ signĂĄl na vĂœstupnĂ obvod. Ten se sklĂĄdĂĄ z vyzaĆovacĂ cĂvky a kondenzĂĄtoru zapojenĂœch jako sĂ©riovĂœ LC ÄlĂĄnek. PĆijĂmacĂ obvod je zapojen jako paralelnĂ rezonanÄnĂ LC obvod. NaindukovanĂ© napÄtĂ je zesilovĂĄno operaÄnĂm zesilovaÄem a nĂĄslednÄ koncovĂœm zesilovaÄem. UsmÄrnÄnĂœ signĂĄl, filtrovanĂœ hornĂ propustĂ, se dĂĄle digitalizuje v mikrokontrolĂ©ru, kde dojde k vyhodnocenĂ a zobrazenĂ vĂœsledku na LCD display, kterĂœ naviguje uĆŸivatele pĆi hledĂĄnĂ polohy. BlokovĂ© schĂ©ma popsanĂ©ho zaĆĂzenĂ je zobrazeno na obr. 4.
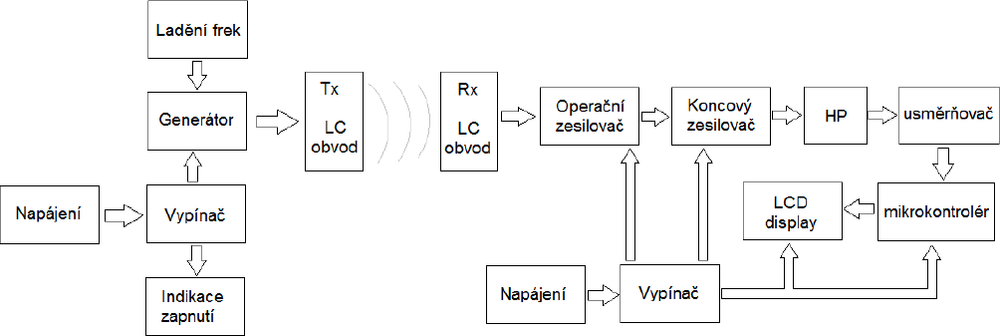
Obr. 4 – BlokovĂ© schĂ©ma indikĂĄtoru poloha za zdĂ
VĆĄechny kroky nĂĄvrhu a zmÄny byly vĆŸdy laboratornÄ testovĂĄny, obr. 5. VĂœsledky pĆijĂmanĂœch signĂĄlĆŻ a vysĂlanĂœch byly v laboratornĂch podmĂnkĂĄch zobrazovĂĄny a porovnĂĄvĂĄny na osciloskopu, aby se detailnÄ ovÄĆilo chovĂĄnĂ navrhovanĂ©ho systĂ©mu pĆi odliĆĄnĂœch stavech a reĆŸimech. V postupu pracĂ nĂĄvrhu byl navrĆŸen prvnĂ vnÄjĆĄĂ vzhled zaĆĂzenĂ vzhledem k parametrĆŻm jednotlivĂœch komponentĆŻ systĂ©mu. Komponenty byly postupnÄ zkouĆĄeny na fantomu stÄny sloĆŸenĂ© z nehomogennĂch materiĂĄlĆŻ, obr. 5.

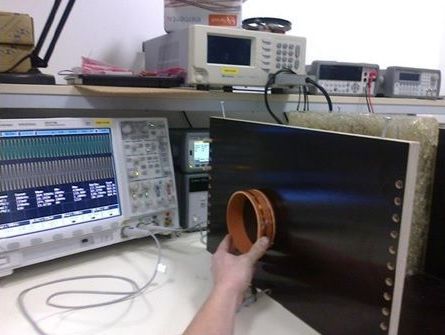


 Obr. 5 – TestovĂĄnĂ a hledĂĄnĂ optimĂĄlnĂho tvaru a uspoĆĂĄdĂĄnĂ pĆijĂmacĂch a vysĂlacĂch cĂvek s vyuĆŸitĂm fantom zdi a heterogennĂch materiĂĄlĆŻ
Obr. 5 – TestovĂĄnĂ a hledĂĄnĂ optimĂĄlnĂho tvaru a uspoĆĂĄdĂĄnĂ pĆijĂmacĂch a vysĂlacĂch cĂvek s vyuĆŸitĂm fantom zdi a heterogennĂch materiĂĄlĆŻV dalĆĄĂ ÄĂĄsti vĂœzkumu byl vytvoĆen selektivnĂ zesilovaÄ, v pĂĄsmu 220 kHz – 350 kHz, na kterĂœ navazuje operaÄnĂ usmÄrĆovaÄ. OperaÄnĂ usmÄrĆovaÄ mĂĄ menĆĄĂ Ășbytek napÄtĂ v propustnĂ©m smÄru a tudĂĆŸ vyĆĄĆĄĂ citlivost pro pĆenĂĄĆĄenĂœ slabĂœ signĂĄl. Na obrĂĄzku 6 je zobrazeno finĂĄlnĂ ĆeĆĄenĂ nedestruktivnĂho zaĆĂzenĂ pro urÄenĂ protilehlosti dvou bodĆŻ pomocĂ mÄĆenĂ maxima modulu amplitudy elektromagnetickĂ© vlny navrĆŸenĂ©ho vysĂlaÄe, pracovnÄ nazvanĂ©ho Opposite Pack. ZaĆĂzenĂ bylo testovĂĄno na vzdĂĄlenosti vnÄjĆĄĂch povrchĆŻ protilehlĂœch mĂst od 200 mm do 500 mm. U vzdĂĄlenosti 330 mm bylo dosaĆŸeno pĆesnosti polohy pĆi testovacĂm reĆŸimu s homogennĂm i nehomogennĂm materiĂĄlem s odchylkou od pozice ±2 mm. PĆi menĆĄĂch vzdĂĄlenostech lze dosĂĄhnout pĆesnÄjĆĄĂch vĂœsledkĆŻ nalezenĂ protilehlosti, ale je nutnĂ©, pomocĂ pĆepĂnaÄe, snĂĆŸit citlivost vstupnĂch obvodĆŻ na stranÄ pĆijĂmaÄe, aby nebyly saturovĂĄny indukovanĂœm napÄtĂ. Velmi dobrĂœch parametrĆŻ citlivosti ke zmÄnÄ polohy antĂ©n vĆŻÄi sobÄ bylo dosaĆŸeno i na maximĂĄlnĂ vzdĂĄlenosti 500 mm v kolmĂ©m smÄru a s odchylkou od pozice ±5 mm. NavrĆŸenĂ© zaĆĂzenĂ tedy pracuje v deklarovanĂœch parametrech do maximĂĄlnĂ vzdĂĄlenosti 500 mm. PĆi urÄovĂĄnĂ protilehlosti je vhodnĂ© postupovat s navrĆŸenou metodikou, aby bylo dosaĆŸeno opakovatelnosti uvedenĂœch parametrĆŻ.

 Obr. 6 – ZaĆĂzenĂ Opposite Pack
Obr. 6 – ZaĆĂzenĂ Opposite PackOptimĂĄlnĂ pracovnĂ postup zaÄĂnĂĄ kalibracĂ, kterĂĄ pĆedstavuje sladÄnĂ vysĂlacĂ a pĆijĂmacĂ ÄĂĄsti pomocĂ potenciometrĆŻ na vysĂlacĂ stranÄ. Na pevnÄ danĂ© vzdĂĄlenosti vysĂlacĂ a pĆijĂmacĂ ÄĂĄsti je postupnÄ pohybovĂĄno ladicĂmi potenciometry, dokud nenĂ na indikĂĄtoru pĆijĂmaÄe zĂskĂĄna maximĂĄlnĂ hodnota napÄtĂ pĆi minimĂĄlnĂm zesĂlenĂ na stranÄ pĆijĂmaÄe. PotĂ© je vysĂlacĂ pĆĂstroj umĂstÄn za zeÄ. ProtilehlĂœ bod se nĂĄslednÄ hledĂĄ pĆijĂmacĂm obvodem, kterĂœm je pohybovĂĄno ve vertikĂĄlnĂm a horizontĂĄlnĂm smÄru, dokud nenĂ nalezeno mĂsto s maximĂĄlnĂ hodnotou napÄtĂ pĆi danĂ©m zesĂlenĂ, kterĂ© je nastaveno dle danĂ©ho prostĆedĂ a danĂ© vzdĂĄlenosti.
4. ZĂĄvÄr
Tento pĆĂspÄvek pojednĂĄvĂĄ o vĂœvoji speciĂĄlnĂho zaĆĂzenĂ urÄenĂ©ho pro pĆesnou lokalizaci polohy za zdĂ. Koncept indikĂĄtorĆŻ polohy s mikroprocesorovĂœm ĆĂzenĂm a deklarovanĂœmi parametry (vzdĂĄlenost, pĆesnost urÄenĂ protilehlosti) je souÄĂĄstĂ podanĂ© ochrany duĆĄevnĂho vlastnictvĂ. IndikĂĄtor je primĂĄrnÄ urÄen pro oblast nedestruktivnĂ detekce poĆĄkozenĂ dĆevÄnĂœch prvkĆŻ staveb pomocĂ RTG zaĆĂzenĂ a pro oblast stavebnictvĂ, kde je tĆeba lokalizovat pĆesnou polohu protilehlĂœch dvou bodĆŻ opaÄnĂœch ploch jednĂ© stÄny. S oÄekĂĄvanou tolerancĂ nalezenĂ pozice bodĆŻ lze systĂ©m pouĆŸĂt pro stavebnĂ materiĂĄly, nejen dĆevÄnĂ© stavebnĂ prvky, ale napĆĂklad i pro betonovĂ© nebo kamennĂ© stavebnĂ prvky pĆi sanaÄnĂch a dalĆĄĂch stavebnĂch Äinnostech. NavrĆŸenĂœ indikĂĄtor vyuĆŸĂvĂĄ principu ĆĄĂĆenĂ elektromagnetickĂ© vlny a sklĂĄdĂĄ se z vysĂlaÄe a pĆijĂmaÄe. VysĂlaÄ vysĂlĂĄ elektromagnetickĂ© vlny z jednĂ© strany zdi a pĆijĂmaÄ s nastavitelnou citlivostĂ na druhĂ© stranÄ vyhodnocuje a pĆedĂĄvĂĄ informaci obsluhujĂcĂmu technikovi o poloze vysĂlaÄe. Metoda je navrĆŸena pro vyhledĂĄvĂĄnĂ maxima modulu amplitudy elektromagnetickĂ© vlny navrĆŸenĂ©ho vysĂlaÄe. PopisovanĂ© zaĆĂzenĂ umoĆŸĆuje detekovat polohu aĆŸ do vzdĂĄlenosti pĆŻl metru s pĆesnostĂ ±5 mm.
PodÄkovĂĄnĂ
PĆĂspÄvek byl vytvoĆen za finanÄnĂ podpory FEKT-S-14-2545/2014, SIX CZ.1.07/2.3.00/30.0005 a spoleÄnosti Thermo Sanace s.r.o.
Literatura
- [1] HĂĄjek, J., JarchovskĂœ, Z. Detektory kovu – nĂĄvod na stavbu: princip zapojenĂ a praktickĂ© nĂĄvody na tĆi konstrukce. 1. vyd. Praha: BEN – technickĂĄ literatura, 2010, 250 s. ISBN 978-80-7300-220-6.
- [2] HĂĄjek, J. ElektronickĂ© hledaÄe. 1. vyd. Praha: BEN – technickĂĄ literatura, 2001, 103 s. ISBN 80-730-0011-3.
- [3] VĂĄgner, P. VysokofrekvenÄnĂ technika. Brno, 2013. Skriptum. VysokĂ© uÄenĂ technickĂ© v BrnÄ.
- [4] NovĂĄÄek, Z. ElektromagnetickĂ© vlny, antĂ©ny a vedenĂ: pĆednĂĄĆĄky. vyd. 1. Brno: VUT FEKT, Ășstav radioelektroniky, 2006, 133 s. ISBN 8021433019.
The paper presents results of specifically developed device for exact localization of the position behind a wall. It is intended for the construction sector where it is necessary to specify exact positions at both sides of the wall. The designed indicator uses the principle of electromagnetic field and it consists of a transmitting part and a receiving part. The transmitter emits electromagnetic waves at a specific frequency and by modulation from one side of the wall and on the other side; the receiver with an adjustable sensitivity evaluates and transmits the information to the operator of the position indicator. The described device makes it possible to detect position behind the wall against the initial point through the barrier thickness up to half a meter.