ûvod do regulaánûÙch jednotek (DDC) v budovûÀch
álûÀnek pojednûÀvûÀ o regulaánûÙch jednotkûÀch, kterûˋ se vyuéƒûÙvajûÙ v systûˋmech automatizace budov a kterûˋ patéûÙ do skupiny tzv. DDC (Direct Digital Control) systûˋmé₤. Tyto regulûÀtory se nejáastáji pouéƒûÙvajûÙ pro éûÙzenûÙ systûˋmé₤, pro náéƒ se véƒila anglickûÀ zkratka HVAC (Heat, Ventilation and Air Condition – TopenûÙ, ventilace a klimatizace). CûÙlem táchto systûˋmé₤ je dosûÀhnout tepelnûˋ pohody v budovûÀch. Celûˋ odvátvûÙ se pak nazû§vûÀ MáéenûÙ a Regulace (MaR). KonkrûˋtnûÙ aplikacûÙ je napé. éûÙzenûÙ vzduchotechnickûˋ jednotky dle péedem definovûˋho projektu.
V álûÀnku je velmi podrobná popsûÀna funkce regulûÀtoru, druhy regulaánûÙch jednotek a z jakû§ch véÀech komponent se mohou sklûÀdat. DûÀle je vysvátleno, jakû§m zpé₤sobem mé₤éƒe probûÙhat programovûÀnûÙ regulûÀtoré₤, jakûˋ jsou druhy regulace, a kterûˋ komunikaánûÙ protokoly jsou nejáastáji vyuéƒûÙvûÀny pro spojenûÙ s prvky polnûÙ instrumentace popé. s nadéazenou grafickou centrûÀlou v budová. Celû§ vû§klad je provûÀdán formou nejprve teoretickûˋho û¤vodu a nûÀsledná praktickûˋho péûÙkladu.
Co je DDC systûˋm?
DDC systûˋm, tedy systûˋm péûÙmûˋho áûÙslicovûˋho éûÙzenûÙ, provûÀdûÙ automatickûˋ éûÙzenûÙ stavu nebo procesu prostéednictvûÙm áûÙslicovûˋ jednotky (regulûÀtoru, poáûÙtaáe, apod.). Samotnûˋ vyhodnocenûÙ éûÙzenûÙ probûÙhûÀ pomocûÙ softwarovûˋ aplikace, kterûÀ je uloéƒena v památi regulûÀtoru. V odbornûˋ terminologii se tato softwarovûÀ aplikace nazû§vûÀ algoritmus, coéƒ je soubor pravidel, kterûˋ vedou k vû§sledku neboli vû§stupu z algoritmu. Na Obr. 1 mé₤éƒeme vidát podrobná rozkreslenû§ princip péûÙmûˋho áûÙslicovûˋho éûÙzenûÙ.

Obr. 1 – Princip péûÙmûˋho áûÙslicovûˋho éûÙzenûÙ
Aby vé₤bec bylo moéƒnûˋ provûÀdát éûÙzenûÙ nájakûˋho stavu, musûÙme mûÙt vstupnûÙ veliáinu, kterou máéûÙme a jûÙéƒ nazû§vûÀme regulovanûÀ veliáina (y). SamotnûÀ máéenûÀ vstupnûÙ hodnota by nebyla dostaáujûÙcûÙ, je nutnûˋ mûÙt daléÀûÙ hodnotu, vé₤ái nûÙéƒ budeme regulovanou veliáinu porovnûÀvat. Tato hodnota se nazû§vûÀ éƒûÀdanûÀ hodnota regulovanûˋ veliáiny (w). Jak jiéƒ z nûÀzvu vyplû§vûÀ, jednûÀ se o nûÀmi poéƒadovanou hodnotu. Tyto dvá hodnoty jsou vstupnûÙ veliáiny do regulaánûÙ jednotky, kde je nûÀsledná proveden odeáet éƒûÀdanûˋ hodnoty od hodnoty regulovanûˋ veliáiny. Vû§sledkem tohoto rozdûÙlu je regulaánûÙ odchylku (e).
Vû§stupem regulaánûÙ jednotky je akánûÙ veliáina (u), kterûÀ vznikne vyhodnocenûÙm regulaánûÙ odchylky dle softwarovûˋ aplikace, kterûÀ je uloéƒena v památi regulûÀtoru. AkánûÙ veliáina je zûÀroveé vstupnûÙ veliáina do regulovanûˋ soustavy, kterûÀ péûÙmo nebo nepéûÙmo ovlivéuje regulovanou veliáinu (y). Jak jste si mohli véÀimnout, opát jsme se dostali na zaáûÀtek celûˋho popisu péûÙmûˋho áûÙslicovûˋho éûÙzenûÙ. Jak je patrnûˋ z Obr. 1, je to zpé₤sobenûˋ zpátnou vazbou, kterûÀ vytvoéûÙ regulaánûÙ smyáku. RegulaánûÙ smyáka provûÀdûÙ opakovanûˋ vyhodnocenûÙ regulaánûÙ odchylky a zpé₤sobuje, aby jejûÙ hodnota byla v ideûÀlnûÙm péûÙpadá nula, v reûÀlnûˋm svátá co moéƒnûÀ nejmenéÀûÙ. To véÀe prostéednictvûÙm pé₤sobenûÙ akánûÙ veliáiny na regulovanou soustavu.
Pokud bychom máli péedchozûÙ teoretickû§ û¤vod do DDC systûˋmé₤ aplikovat na konkrûˋtnûÙ situaci z oblasti automatizace budov, mé₤éƒeme si péedstavit regulaci teploty v mûÙstnosti. Jak je patrnûˋ z Obr. 3, regulovanou veliáinou je v tomto péûÙpadá myéÀlena teplota v mûÙstnosti (tm), kterou máéûÙme pomocûÙ snûÙmaáe teploty. é§ûÀdanou hodnotu regulovanûˋ veliáiny reprezentuje éƒûÀdanûÀ teplota v mûÙstnosti (ts), kterou si nastavuje uéƒivatel buá pomocûÙ termostatu, nebo v péûÙpadá vátéÀûÙ budovy je teplota nastavovûÀna pomocûÙ nadéazenûˋ centrûÀly. Tyto veliáiny jsou vstupnûÙmi hodnotami do regulaánûÙ jednotky. Na zûÀkladá naprogramovanûˋho algoritmu, kterû§ v sobá nejáastáji obsahuje PID (proporcionûÀlná-integraáná-derivaánûÙ) smyáku, dochûÀzûÙ k vû§poátu vû§slednûˋ akánûÙ veliáiny, kterûÀ odpovûÙdûÀ nastavenûÙ polohy téûÙcestnûˋho smáéÀovacûÙho ventilu u vodnûÙho ohéûÙvaáe vzduchotechnickûˋ jednotky, pokud je poéƒadavek na vytûÀpánûÙ, nebo nastavenûÙ polohy téûÙcestnûˋho rozdálovacûÙho ventilu u vodnûÙho chladiáe, pokud je zapotéebûÙ mûÙstnost chladit. PéedpoklûÀdejme pro nûÀéÀ péûÙklad, éƒe je nutnûˋ mûÙstnost vytûÀpát. SamotnûÀ vzduchotechnickûÀ jednotka obsahuje vodnûÙ ohéûÙvaá (Obr. 2), kterû§m proudûÙ vzduch a ohéûÙvûÀ se na poéƒadovanou teplotu. OhéûÀtûÙ vzduchu je zaloéƒenûˋ na principu sdûÙlenûÙ tepla mezi vzduchem a vodou, kterûÀ proudûÙ uvnité ohéûÙvaáe. Teplota tûˋto vody je regulovûÀna pomocûÙ smáéÀovacûÙho ventilu (SV na Obr. 2), kterû§ je osazen pohonem. AkánûÙ veliáina tedy odpovûÙdûÀ poloze, do kterûˋ se mûÀ pohon nastavit.
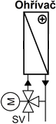
Obr. 2 – Schematickûˋ znûÀzornánûÙ vodnûÙho ohéûÙvaáe
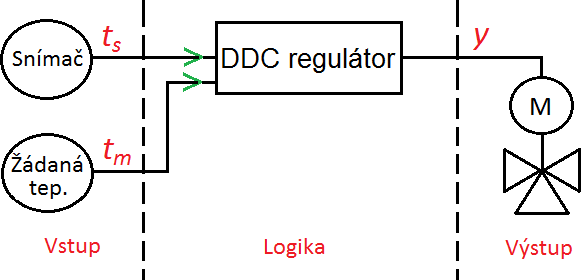
Obr. 3 – PéûÙklad DDC éûÙdicûÙ smyáky
Pomár péûÙvodnûÙ a cirkulaánûÙ vody mánûÙ teplotu péûÙvodnûÙ vody do ohéûÙvaáe, kde dochûÀzûÙ k ohéûÀtûÙ prochûÀzejûÙcûÙho vzduchu, kterû§ smáéuje do regulovanûˋ soustavy. áûÙm vûÙce se teplota v mûÙstnosti blûÙéƒûÙ éƒûÀdanûˋ hodnotá, tûÙm mûˋná teplûÀ voda je péivûÀdána do vû§mánûÙku tepla.
Architektura DDC regulûÀtoru
Hned na û¤vod je téeba poznamenat, éƒe DDC regulûÀtor je malû§ poáûÙtaá, tedy alespoé z hlediska architektury. DDC regulaánûÙ jednotka obsahuje stejná jako klasickû§ stolnûÙ poáûÙtaá procesorovou jednotku, pamáéË a vstupnûÙ a vû§stupnûÙ obvody. Jak mé₤éƒeme vidát na ObrûÀzku 4, regulaánûÙ jednotka je zaloéƒena na slavnûˋ Von Neumannová architektuée, jejûÙéƒ koncept publikoval jiéƒ v roce 1945 stejnojmennû§ geniûÀlnûÙ vádec John Von Neumann. HlavnûÙ vû§hoda tûˋto architektury spoáûÙvûÀ v tom, éƒe je nezûÀvislûÀ na typu éeéÀenûˋ û¤lohy. Jinû§mi slovy poáûÙtaá zpracuje data dle programu, kterû§ je naprogramovûÀn a uloéƒen v památi spoleáná s daty (na rozdûÙl od Harvardskûˋ architektury, kterûÀ mûÀ samostatnou pamáéË pro data a program).
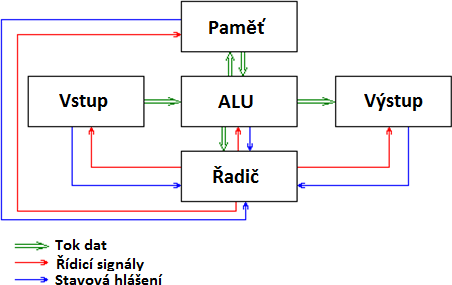
Obr. 4 – Von Neumannova architektura
Celû§ princip áinnosti Von Neumannovy architektury je nûÀsledujûÙcûÙ. Nejprve se do památi uloéƒûÙ program pomocûÙ vstupnûÙch obvodé₤, kterû§ bude provûÀdát vû§poáty nad danû§mi daty. Obdobnû§m zpé₤sobem se do památi umûÙstûÙ data, kterûÀ se budou zpracovûÀvat. Probáhne vlastnûÙ vû§poáet, jehoéƒ jednotlivûˋ kroky provûÀdûÙ aritmeticko-logickûÀ jednotka (ALU). Tato jednotka je v pré₤báhu vû§poátu spolu s ostatnûÙmi moduly éûÙzena éadiáem. Mezivû§sledky vû§poátu jsou uklûÀdûÀny do operaánûÙ památi. Po skonáenûÙ vû§poátu jsou vû§sledky poslûÀny pées ALU na vû§stupnûÙ zaéûÙzenûÙ. JeéÀtá je dobrûˋ poznamenat, éƒe ALU a éadiá spoleáná tvoéûÙ procesor.
PéedchozûÙ popis architektury je zjednoduéÀen, ale tento álûÀnek si nedûÀvûÀ za cûÙl popisovat do detailu áinnost poáûÙtaáe. Dé₤leéƒitûˋ je, aby si átenûÀé dal do souvislosti, jakû§m zpé₤sobem pracuje regulaánûÙ jednotka pod svû§m krytem a co se tam odehrûÀvûÀ. Pokud bychom péedchûÀzejûÙcûÙ popis architektury péevedli do éeái systûˋmé₤ automatizace budov, tak za vstup a vû§stup bychom dosadili buá integrovanûˋ V/V nebo rozhranûÙ pro komunikaánûÙ sbárnice, kterûˋ umoéƒéujûÙ komunikaci s ostatnûÙmi zaéûÙzenûÙ. PamáéË a procesor je totoéƒnûÀ s báéƒnû§m poáûÙtaáem, na kterûˋm si prûÀvá átete tento álûÀnek.
Shréme si, co jsme se zatûÙm dovádáli. V û¤vodu jsme si definovali zûÀkladnûÙ pojmy a vysvátlili si, co je DDC systûˋm a jakû§m zpé₤sobem probûÙhûÀ regulace regulovanûˋ veliáiny. Péedvedli jsme si, éƒe DDC regulaánûÙ jednotka se prakticky neliéÀûÙ od báéƒnûˋho poáûÙtaáe a jiéƒ vûÙme, éƒe se uvnité regulûÀtoru nachûÀzûÙ program, kterû§ obsahuje algoritmy pro obsluhu dat, kterûˋ péijûÙmûÀ pées integrovanûˋ V/V nebo pées rozhranûÙ komunikaánûÙch sbárnic. V nûÀsledujûÙcûÙ áûÀsti si popûÙéÀe rozdálenûÙ DDC regulûÀtoru.
RozdálenûÙ regulûÀtoré₤
DDC regulûÀtor je v podstatá mozek celûˋho systûˋmu, kterû§ neustûÀle péijûÙmûÀ vstupnûÙ hodnoty, kterûˋ zpracuje dle naprogramovanûˋ aplikace, a vysûÙlûÀ vû§stupnûÙ signûÀly, kterû§mi éûÙdûÙ celû§ systûˋm.
V tûˋto sekci se budeme vánovat rozdálenûÙ regulûÀtoré₤ dle ré₤znû§ch pohledé₤. Jako prvnûÙ je na zûÀkladá péûÙtomnosti vstupé₤ a vû§stupé₤ (V/V) péûÙmo na regulaánûÙ jednotce nebo moéƒnosti péipojenûÙ externûÙch V/V modulé₤. DDC regulûÀtor mé₤éƒe mûÙt integrovanûˋ analogovûˋ a digitûÀlnûÙ V/V. Jakû§m zpé₤sobem jsou rozdáleny a vyuéƒûÙvûÀny V/V je podrobná popsûÀno v álûÀnku zde. Jen pro rychlûˋ shrnutûÙ:
- Analogovû§ vstup, napé. signûÀl z teplotnûÙho snûÙmaáe
- Analogovû§ vû§stup, napé. signûÀl od regulûÀtoru do pohonu ventilu nebo klapek
- DigitûÀlnûÙ vstup, napé. signûÀl od motoru ventilûÀtoru indikujûÙcûÙ, jestli ventilûÀtor báéƒûÙ
- DigitûÀlnûÙ vû§stup, napé. signûÀl od regulûÀtoru pro start nebo stop motoru ventilûÀtoru

Obr. 5 – UkûÀzka regulûÀtoru bez integrovanû§ch V/V

Obr. 6 – UkûÀzka regulûÀtoru s integrovanû§mi V/V
V souáasnûˋ dobá na trhu existujûÙ regulaánûÙ jednotky jak s integrovanû§mi V/V (Obr. 5), tak bez V/V (Obr. 6). Jelikoéƒ lze ve velkû§ch aplikacûÙch péedpoklûÀdat, éƒe projekt bude obsahovat stovky aéƒ tisûÙce V/V, vû§robci na vû§konnûˋ regulaánûÙ jednotky tûˋmáé neosazujûÙ integrovanûˋ V/V. V takovûˋm péûÙpadá je zbyteánûˋ poéizovat regulûÀtory s integrovanû§mi V/V, jelikoéƒ bude nutnûˋ poéûÙdit velkûˋ mnoéƒstvûÙ externûÙch V/V modulé₤. Z toho vyplû§vûÀ, éƒe regulûÀtory bez integrovanû§ch V/V jsou vátéÀinou vû§konnájéÀûÙ a robustnájéÀûÙ pro vátéÀûÙ aplikace. Naopak pro menéÀûÙ aplikace (éûÀdová jednotky aéƒ desûÙtky V/V) je vû§hodnájéÀûÙ poéûÙdit pouze regulaánûÙ jednotku s integrovanû§mi V/V, kde mûÀme véÀe potéebnûˋ obsaéƒeno v jednom zaéûÙzenûÙ. Toto samozéejmá neplatûÙ véƒdy, ale obecná se dûÀ éûÙci, éƒe vû§robci se snaéƒûÙ nastavit podobnû§ trend.
DûÀle lze DDC regulûÀtory rozdálit podle zpé₤sobu programovûÀnûÙ. V souáasnûˋ dobá existujûÙ dva hlavnûÙ péûÙstupy pro programovûÀnûÙ regulûÀtoré₤. PrvnûÙm je péûÙmûˋ programovûÀnûÙ kû°du v programovacûÙm jazyce (Obr. 7). Péi tomto druhu programovûÀnûÙ je nutnûÀ hlubokûÀ znalost jak programovacûÙho jazyka, tak samotnûˋho regulûÀtoru. ProgramûÀtor si musûÙ bû§t vádom limité₤ a omezenûÙ regulaánûÙ jednotky. MusûÙ umát sprûÀvná adresovat a zpracovûÀvat informace od jednotlivû§ch porté₤ a V/V.
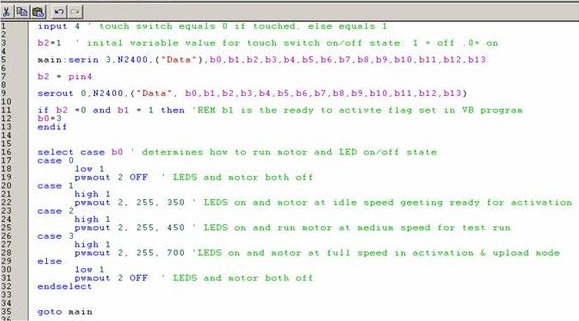
Obr. 7 – UkûÀzka programovûÀnûÙ pomocûÙ kû°du
Vzhledem k támto okolnostem jiéƒ dnes vátéÀina péednûÙch svátovû§ch vû§robcé₤ umoéƒéuje programovûÀnûÙ tzv. logickû§m propojovûÀnûÙm funkánûÙch bloké₤ (Obr. 8). U tohoto typu nenûÙ nutnûÀ znalost éƒûÀdnû§ch péûÙkazé₤, ale jak je patrnûˋ z Obr. 8, jednûÀ se propojovûÀnûÙ funkánûÙch bloké₤ mezi sebou. FunkánûÙ blok péedstavuje jednu péesná definovanou funkci. éeknáme, éƒe chceme regulovat vniténûÙ teplotu v mûÙstnosti pomocûÙ PID smyáky. K vytvoéenûÙ celûˋ tûˋto logiky nûÀm staáûÙ pouze átyéi funkánûÙ bloky! Potéebujeme funkánûÙ blok reprezentujûÙcûÙ analogovû§ vstup (AI1), kterû§ slouéƒûÙ ke átenûÙ hodnoty regulovanûˋ veliáiny (souáasnûˋ teploty v mûÙstnosti) a funkánûÙ blok péedstavujûÙcûÙ éƒûÀdanou hodnotu regulovanûˋ veliáiny (Setp1). DûÀle mûÀme funkánûÙ blok, kterû§ reprezentuje celou PID smyáku (PID1), na jehoéƒ vstupy péivedeme AI1 a Setp1. Vû§stupem z funkánûÙho bloku PID smyáky je vû§slednûˋ nastavenûÙ téûÙcestnûˋho ventilu, kterû§ péedstavuje analogovû§ vû§stup (AO1). Jiéƒ z tohoto péûÙkladu je jasnûˋ, éƒe tento péûÙstup k programovûÀnûÙ regulaánûÙch jednotek je mnohem jednoduéÀéÀûÙ, komfortnájéÀûÙ a péedevéÀûÙm mûˋná nûÀchylnû§ k chybûÀm.
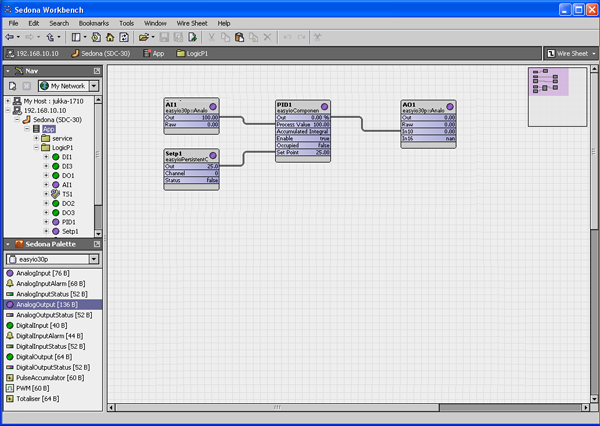
Obr. 8 – UkûÀzka programovûÀnûÙ pomocûÙ logickûˋho propojovûÀnûÙ funkánûÙch bloké₤
PoslednûÙm typem jsou tzv. konfigurovatelnûˋ regulûÀtory. Tyto regulûÀtory jsou jiéƒ péedprogramovûÀny z vû§roby a umoéƒéujûÙ vû§bár algoritmu pro konkrûˋtnûÙ aplikaci. PouéƒûÙvajûÙ se napé. pro éûÙzenûÙ jednoduchû§ch kotelen, vû§mánûÙkovû§ch stanic ái menéÀûÙch vzduchotechnik. Aplikaci si uéƒivatel vybere buá pomocûÙ uéƒivatelskûˋho rozhranûÙ péûÙmo na regulûÀtoru (typicky displej s tlaáûÙtky) nebo pomocûÙ specializovanûˋho softwarovûˋho nûÀstroje. Velkou vû§hodou táchto konfigurovatelnû§ch regulûÀtoré₤ je fakt, éƒe jsou pomárná levnûˋ oproti volná programovatelnû§m regulûÀtoré₤m. Je zde zûÀroveé nutnûˋ zdé₤raznit, éƒe tyto regulûÀtory se pouéƒûÙvajûÙ spûÙéÀe v menéÀûÙch aplikacûÙch.
DaléÀûÙm dé₤leéƒitû§m hlediskem pro rozdálenûÙ regulûÀtoré₤ je péûÙtomnost web-serveru. Co je vlastná web-server? TûÙmto pojmem se rozumûÙ zaéûÙzenûÙ, kterûˋ je odpovádnûˋ za vyéizovûÀnûÙ HTTP poéƒadavké₤ od klienté₤ (nejáastáji webovû§ch prohlûÙéƒeáé₤). VyéûÙzenûÙm poéƒadavké₤ se rozumûÙ odeslûÀnûÙ cûÙle specifikovanûˋho URL (typicky webovûÀ strûÀnka, ale tûˋéƒ statickû§ text, obrûÀzek ái jinû§ soubor).
Pokud bychom to máli napsat û¤plná jednoduéÀe, regulûÀtor s vestavánû§m webovû§m serverem umoéƒéuje, aby k námu bylo péistupovûÀno pées webovûˋ rozhranûÙ (internet). V souáasnûˋ dobá, kdy je internet véÀude kolem nûÀs, je toto tûˋmáé zûÀkladnûÙ poéƒadavek. DaléÀûÙm aspektem, dle kterûˋho lze dálit regulûÀtory, je vû§áet rozhranûÙ, kterûÀ regulûÀtor obsahuje. Pokud napé. regulûÀtor obsahuje rozhranûÙ pro RS485 lze péedpoklûÀdat, éƒe umoéƒéuje péipojit zaéûÙzenûÙ pées protokoly Modbus ái BACnet/MS-TP. Pokud obsahuje rozhranûÙ RS232, mé₤éƒe pak podporovat péipojenûÙ M-Bus sbárnice nebo obsahuje-li RJ-45 port, pak tûˋmáé jistá bude podporovat péipojenûÙ pées BACnet/IP. Toto je klûÙáovûˋ péi koupi regulûÀtoré₤, protoéƒe potéebujeme, aby podporoval protokoly, pées kterûˋ chceme komunikovat.
Literatura
- [1] DRKAL F., ZMRHAL V., SCHWARZER J. a LAIN M. Klimatizace a pré₤myslovûÀ vzduchotechnika [online]. 2009 [cit. 2012-03-27].
- [2] DRKAL F., ZMRHAL V., SCHWARZER J. a LAIN M. Vzduchotechnika [online]. 2009 [cit. 2012-03-27].
- [3] HIRé , JiéûÙ. Vzduchotechnika v péûÙkladech [online]. Vyd. 1. Brno: Akademickûˋ nakladatelstvûÙ CERM, 2006, 230 s. [cit. 2012-03-27]. ISBN 80-720-4486-9.
- [5] CHYSKû J., HEMZAL K. A KOL. VátrûÀnûÙ a klimatizace. Vyd. 3., zcela péeprac. Praha: áeskûÀ Matice technickûÀ, 1993, 490 s. ISBN 80-901-5740-8.
- [6] BAé TA J., HEMZAL V. Regulace v technice prostéedûÙ [online]. 2009 [cit. 2012-04-27].
- [7] LOM M., MATZ V. Model éûÙzenûÙ vzduchotechnickûˋ jednotky [online]. 2013 [cit 2015-06-26]
http://vetrani.tzb-info.cz/regulace-vetrani-klimatizace/9796-model-rizeni-vzduchotechnicke-jednotky - [8] http://products.centraline.com/cz/
This paper describes the controller functions, types of control units and from which all components can be composed. Next part is about explaining how to program the controllers can take place, what are the types of controlling and communication protocols that are most frequently used for connection to field devices and supervisor. The whole interpretation is conducted through first theoretical introduction followed by practical example. The whole paper is written exclusively on control units, which are used in building automation and belonging to the group DDC (Direct Digital Control) systems. These controllers are most often used to HVAC systems (Heat, Ventilation and Air Condition). The aim of these systems is to achieve thermal comfort in buildings. The whole industry is then called Measurement and Control. Specific application is e.g. controlling of Air handling unit according to pre-defined project.